
Weird Issues with Motor
Forums:
I am having a very strange issue with the board and motors. The board works perfectly up until i connect my motors and try to run them. When running the motors i get a very high pitched noise and barley any movement. The voltage reading on the terminals when the motors are connected fluctuates between 1.5 and 0.4 (which is obviously no where near enough). When no motors are connected to the PicoBorg's screw terminals the reading gives me a perfect 12.7 Volts. Any help would be appreciated.
I am using:
-12 Volt, 10 Amp electric scooter battery and
-2 x 12-36 Volt, 250 Watt Amp Flow electric scooter motors.
I looked through the entire PicoBorgRevers forum and only found this post being somewhat similar: https://www.piborg.org/node/485
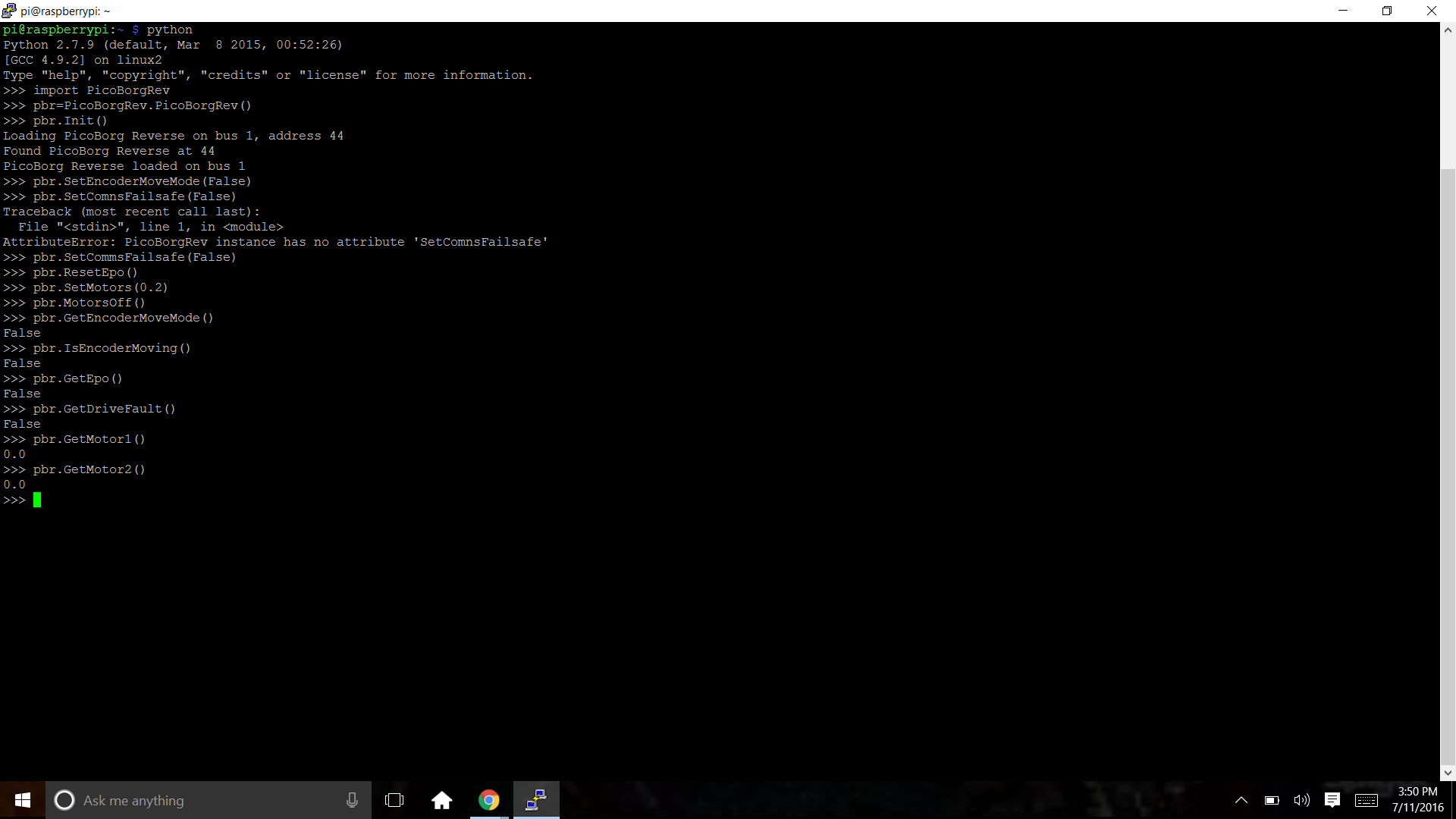
I also attached the output for your recommended diagnosis based off of that forum. Thanks again for the help.
Steven Flynn
- Log in to post comments


sflynn218@yahoo.com
Mon, 07/11/2016 - 21:03
Permalink
Oh ya
Oh and the battery is fully charged, at least when i cheked the volts on the battery they were just over 12
piborg
Tue, 07/12/2016 - 12:04
Permalink
Motor power
It sounds like the motors you are trying to use are simply too much for PicoBorg Reverse to handle.
A 250 Watt motor running at 12 Volts needs 250 ÷ 12 ≈ 20.8 Amps to run correctly.
The PicoBorg Reverse is only designed to handle up to 5 Amps per channel.
Even with the channels paired to drive a single motor the board can only handle 10 Amps in total.
The nasty high-pitched squeal you are hearing is the internal protection kicking in to prevent the board from overheating.
This is why the voltage is reading so low, it is continually disabling the output to prevent damage.
We would usually recommend a Diablo to someone who wants to drive motors this powerful.
Unfortunately we have no stock at the moment and it will probably be a while before we have them available again.
sflynn218@yahoo.com
Tue, 07/12/2016 - 15:33
Permalink
Worked Before
ok so first of all i made a mistake with the Watts. At 12 volts the motor would be 125 Watts.
I was afraid the picoBorg would not be able to handle the motors but i tested it; and a couple days ago and they worked perfectly. Also, before buying the board i took an amp reading with a multi meter and was getting about 1.3A (this was with the motors connected directly to the battle). I know this does not match the formula 125 / 12 = 10.42 Amps but that is what i was getting. (this is something im a bit confused on)
Why would the board work with the motors before but all of a sudden stop working?
piborg
Tue, 07/12/2016 - 16:03
Permalink
Battery charge
This may mean the battery is getting flat.
Unfortunately it is not that simple to determine how much charge is left in the battery using a volt meter.
Most batteries also read higher than rated when they are fully charged.
Assuming the battery is starting to get flat then as the motors try and draw power:
If this is the case measuring the battery voltage while trying to run the motor should read fairly low, something like 8 volts.
Again the motors will not run properly as they do not get enough power.
I would suggest giving the battery a full recharge, then measure what voltage it has.
After that I think it will probably work like it did originally.
sflynn218@yahoo.com
Tue, 07/12/2016 - 20:21
Permalink
Didnt work
The battery still has 12,6 volts, i charged it up to about 13 volts and still get the same results. When trying to run the motors the voltage across the battery does not fluctuate very much as mentioned above.
sflynn218@yahoo.com
Tue, 07/12/2016 - 20:22
Permalink
Directly to battery
i forgot to mention, the motors work when connected directly to the battery.
sflynn218@yahoo.com
Tue, 07/12/2016 - 22:41
Permalink
Worked when Lifting wheel
At the risk of very much annoying you guys im using the motors with a wheel and a chain. Long story short i lifted the wheel of the ground and the motor worked, after putting the motor back on the ground i got the same issue as before. I am now at a complete loss but really appreciate all your help.
piborg
Wed, 07/13/2016 - 11:14
Permalink
Motor load
Put very simply the amount of work the motor has to do affects how much current it tries to draw from the battery.
The lowest amount the motor will draw is known as the no-load current.
This is usually measured with nothing attached to the motor and running at the intended voltage.
I am guessing in your case this will be the 1.3 A you measured earlier.
The largest amount the motor will draw is known as the stall current.
This is how much the motor will draw when it is not actually moving and has been given the intended voltage.
Motors will typically draw this much to get going when they are loaded with a practical work load.
I think the trouble is that the motor with a wheel on the ground as its load is exceeding the current limit on the PicoBorg Rerverse, thus preventing the motor from starting to move.
There is a good video explaining the differences here:
How to Determine DC Motor Current/Amp Draw
sflynn218@yahoo.com
Wed, 07/13/2016 - 21:51
Permalink
thank you
yes the video helped and i had come to pretty much the same conclusion. Thank you so much for all your input i really appreciate it.
Any idea on when the new diablo boards will be available?
piborg
Thu, 07/14/2016 - 10:15
Permalink
Diablo stock
Unfortunately it will be a while before the redesign can be completed.
We are currently working on a big project based around a new robot we have been designing for the past month or two.
We are expecting to announce it in a week or two, after this we will have some spare time to put towards the Diablos redesign.
It looks like we might be able to sort out a small number of the old design in the next few weeks.
Having said that last time we thought this it fell through so I cannot promise anything.