
Ultrasonic distance sensor (HC-SR04) with Diddyborg
Forums:
Hello
First i do say that I'm a newbie with Raspberry pi!
I have several questions about the Diddyborg!
1. Which system is better? A Ultrasonic distance sensor (HC-SR04) with servo or three of them fix mounted?
2. I will use a TFT Display (https://www.adafruit.com/product/2441). So where On the Raspberry Pi do i plug the connector from the PicoBorg Reverse? The connector side of the Raspberry Pi 3 is used from the display!
Images:
 with Servo")
- Log in to post comments


piborg
Tue, 08/23/2016 - 13:25
Permalink
Ultrasonics and DiddyBorg
We would usually go with the three fixed given those choices.
The reasons are:
There are benefits to the servo mounted sensor though:
To connect the PicoBorg Reverse you will need to use the GPIO header on the TFT board itself:

Make sure you attach to the correct pins on the header, pin 1 is labeled with a triangle on the PCB:

The layout should be identical to the older 2x16 GPIO standard.
cocoda74
Fri, 09/02/2016 - 18:36
Permalink
Script for Driving with Sensor
Hello
Is there a script for the Diddyborg with 3 Distance Sensor?
piborg
Sat, 09/03/2016 - 08:57
Permalink
Ultrasonic control
We do not have a complete example, no.
There are some basic examples that may help get you started on this thread:
Use UltraBorg to control DiddyBorg
cocoda74
Tue, 08/23/2016 - 14:46
Permalink
Hello
Hello
Thanks a lot!
I have another question.
Is it possible to use an PS4 Joystick instead of an PS3 Joystick?
Whre i could find some help?
piborg
Tue, 08/23/2016 - 15:16
Permalink
PS4 controller
If you can get the PS4 controller to appear as a joystick then it should work fine with the DiddyBorg.
We do not have any to try, but there is some help here for RetroPie that might be useful:
https://github.com/retropie/retropie-setup/wiki/Setting-up-a-PS4-controller
cocoda74
Wed, 08/24/2016 - 19:29
Permalink
Hello
Hello
I could pair the PS4 but when i test it with
jstest /dev/input/js01
i don't receive real-time data!
Is this normal?
piborg
Thu, 08/25/2016 - 10:30
Permalink
Output from jstest
The output from jstest should change as you move the analog sticks or press buttons.
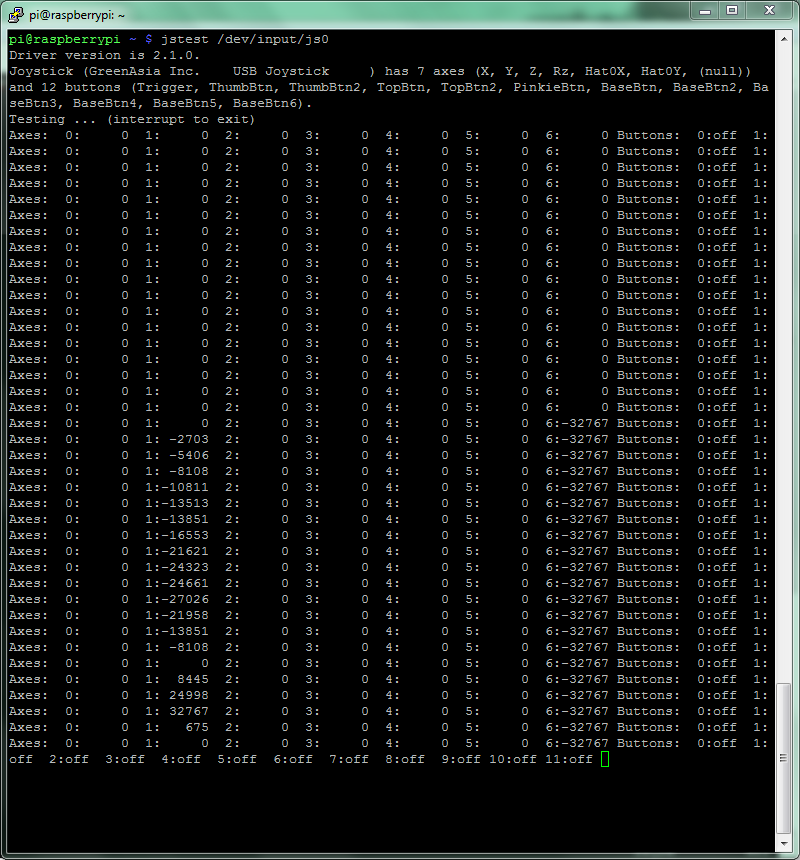
Something like this:
If it is not doing that then the script will not work correctly.
We may be able to help get it working, usually the pairing is the tricky bit.
ls /dev/input/js*?jstestcommand currently displaying?cocoda74
Thu, 08/25/2016 - 13:01
Permalink
Thanks for reply!See!
Thanks for reply!
See!
Perhaps is it an usue with the onboard bluetooth Modul! I`v heard that it can be solved with a USB Bluetooth Modul...
piborg
Thu, 08/25/2016 - 13:48
Permalink
Bluetooth module
It is possible, we have seen this behavior where it seems to get "stuck" from PS3 remotes when using older 2.0 Bluetooth dongles.
The strange thing is that the PS3 remotes work fine with the on-board Bluetooth, but there are a number of people on saying that it does not work with the PS4 remotes for some reason.
There is a short compatibility list here that may help:
https://github.com/chrippa/ds4drv/wiki/Bluetooth%20dongle%20compatibility
There are also some suggestions for troubleshooting here:
https://github.com/chrippa/ds4drv/issues/22#issuecomment-36604456
cocoda74
Thu, 08/25/2016 - 17:48
Permalink
Thanks for the links but it
Thanks for the links but it doesn't help!
I ordered now a Bluetooth Dongle, perhaps i have luck!
Greats